


ヒトは“変化した身体”にいかに適応して運動を制御するかを解明
— サルの腱移行モデルにより、2段階の適応パターンを提示 —
国立精神・神経医療研究センター(NCNP)神経研究所モデル動物開発研究部のRoland Philipp研究員、関和彦部長ら、NCNP病院整形外科の原友紀医師、電気通信大学大学院情報理工学研究科の舩戸徹郎准教授らの研究グループは、交通事故などによる外傷や脳梗塞による麻痺発症などで身体の筋骨格構造や機能が急激に変わったときに、人間がどうやってその変化に適応し、再びスムーズに動けるようになるのかを明らかにしました。
パラリンピック選手などに見られるように、リハビリテーション訓練によって、人間はその変化した身体を驚くほどうまく使いこなせるようになる場合があります。しかし、そうした変化への適応がどのようなメカニズムで、どのような時間経過で起こるのかについては、まだ不明な点が多く残されています。そこで研究チームは、サルの腱移行(けんいこう)(※1)モデルを用いて、身体の一部の役割が入れ替わったときに動作がどのように回復していくかを、行動(課題の成功率・軌道の滑らかさ)と筋電図(EMG)(※2)の同時計測で手術直後から数週間にわたり連続的に調べました。その結果、データから2段階の適応が現れることを見いだしました。まず短い期間に表れる“すばやい適応”では、成功はするものの大きな努力(エネルギー)を要する傾向が強く、誤適応(maladaptation)(※3)といえる側面が示されました。つづく“ゆっくりした適応”では、筋どうしの協調が整い、無駄な力が減って動きの質が高まり、現実的で安定した動かし方へと落ち着きました。
本研究成果は国際学術誌「eLife」に採択され、【2025年11月5日】にオンライン公開されました。
研究の背景
私たちが手足を思いどおりに動かすには、「身体のしくみ」と「脳からの指令」がうまくかみ合う必要があります。通常、脳は身体の反応を予測する“ルール(内部モデル)”を持ち、そのルールに基づいて指令を出します。しかし、外傷や麻痺などで筋や骨の働きが変わると、これまで通りの指令では同じ結果が得られず、動きがぎこちなくなったり、思った方向に力が出なかったりします。術後のリハビリでは、「最初は動かしにくいが、練習していくうちに自然と動けるようになる」という経過は多くの方が経験する現象です。では、このリハビリの過程で、人間の脳や脊髄は身体の変化をどのように感知しているのでしょうか。そして、その変化した身体を再びうまく操る方法を、どのような手順や順番で学んでいるのでしょうか。これを調べるには、一人の患者さんを長期間にわたって計測する必要があり、さらに身体の変化は各患者さんで異なるため、こうした変化への適応メカニズムに関する先行研究は限られており、不明な点が多いのが現状です。そこで今回、研究チームは臨床的な状況を、ヒトとよく似た脳神経系と筋骨格構造を持つサルで再現し、筋電図計測などを用いて、この適応メカニズムの解明に取り組みました。
研究の概要
研究チームは、サルの手指の動きをつくる20以上の筋肉のうち、「指を伸ばす筋」と「指を曲げる筋」のうち一つずつの腱(けん)を付け替え、その筋が出す力の向きを入れ替えました(図1)。手術前から、サルには(1)目前に置かれたレバーを親指と人差し指で掴んで引っ張る、(2)一定時間引っ張ったあと、指定した速さで離す課題を練習してもらい、手術後も同じ課題を継続しました。計測は二つの層で行いました。第一に行動として、成功率、到達時間、軌道の滑らかさ(ばらつき)を日ごとに追跡しました。第二に筋活動(EMG)として、前腕・手指の主要筋から記録し、どの筋がいつ・どれくらい働くか、および拮抗筋の共同収縮(※4)の程度を評価しました。
解析では、あらかじめ期間を区切らずに行動とEMGの時系列を連続的に追いました。その結果、データから2段階の適応が浮かび上がり、これを早期(数日〜約1週間)と慢性期(数週間)と呼んで整理しました。これに基づき、「成功のしやすさ」と「必要な努力(EMG総量や共同収縮指標)」の関係を比較したところ、早期は“大きな努力を要する成功”に偏り、やがて協調回復と省エネ化へ切り替わる時間的シフトが示されました。このような結果に基づき、運動リハビリテーションにおいて2つの異なった時定数を有する適応が存在し、それらが並列に機能していることを示すモデルを提案しました。
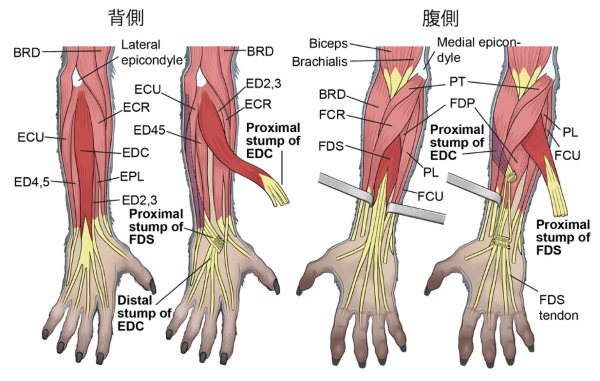
| 図1:マカクサル前腕の筋解剖と腱移行手術 本研究で対象とした前腕主要筋の模式図。背側(dorsal view)および掌側(volar view)を示す。図は、総指伸筋(extensor digitorum communis: EDC)と浅指屈筋(flexor digitorum superficialis: FDS)の腱を交差させて付け替える外科的腱移行手技を示している。図中にラベル付けされたすべての筋には筋電図(EMG)電極を埋め込んだ。筋名の略語:BRD=腕橈骨筋(brachioradialis)、ECR=橈側手根伸筋(extensor carpi radialis)、ECU=尺側手根伸筋(extensor carpi ulnaris)、ED2,3=総指伸筋 第2・3指(extensor digitorum-2,3)、ED4,5=総指伸筋 第4・5指(extensor digitorum-4,5)、EPL=長母指伸筋(extensor pollicis longus)、FCR=橈側手根屈筋(flexor carpi radialis)、FCU=尺側手根屈筋(flexor carpi ulnaris)、FDP=深指屈筋(flexor digitorum profundus)、PL=長掌筋(palmaris longus)、PT=円回内筋(pronator teres)。 |
研究成果
1) “すばやい適応”の誤適応的側面(大きな努力を要する成功)の同定手術直後、サルは課題に素早く再成功しましたが、そのために大きな努力(EMG総量の増大)を払っていることが確認されました。付け替えたのは一つの屈筋と一つの伸筋のみであったにもかかわらず、EMGでは付け替えていない筋まで活動の役割が広く入れ替わる傾向が見られ、屈筋群と伸筋群が“まるごと入れ替わった”かのように振る舞うパターンが観察されました。脳は未経験の身体変化に直面し、“全部が入れ替わった”と誤って一般化したと考えられます。その結果、成功はするが多くのエネルギーを浪費するという誤適応的な早期戦略が明らかになりました。
2) “ゆっくりした適応”による新たな運動戦略の学習の発見 (図2)
上記の“誤適応”の期間中、異なる適応パターンが出現しました。これは臨床的にトリックモーションと呼ばれるもので、手首をより屈曲することで指を開きやすくする新しい運動パターンです。このパターンは測定期間を通じてゆっくりと獲得・定着していきました。
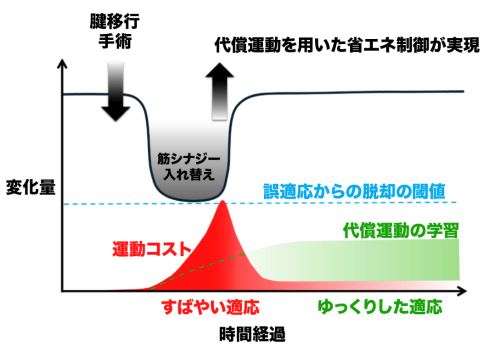
3) 誤適応的な努力性運動から、省エネ運動戦略への短時間での切り替えの発見 (図3)
サルは早期に努力を増加させ続けましたが、ある時点で突然“力を抜く”方向へ切り替える現象が観察されました。切り替え後は、付け替えていない筋の活動が元のパターンに近づく一方で、運動成績は維持・改善しました。これは、内部で進行していた“ゆっくりした適応”により、誤適応的な運動制御を修正できる準備が整い、その結果として急峻な戦略転換が生じたと推定されます。
4) 完全復元ではなく“実用的な安定解”への到達の確認
適応の最終的な到達点は術前の完全な動作パターンの再現ではなく、成功率・滑らかさ・努力(エネルギー)のバランスが取れた現実的で安定した解でした。この結果は、長期の適応期間を通じて、中枢神経系が「変化した身体」に最も適した新しい制御戦略を学習し、確立したことを意味します。
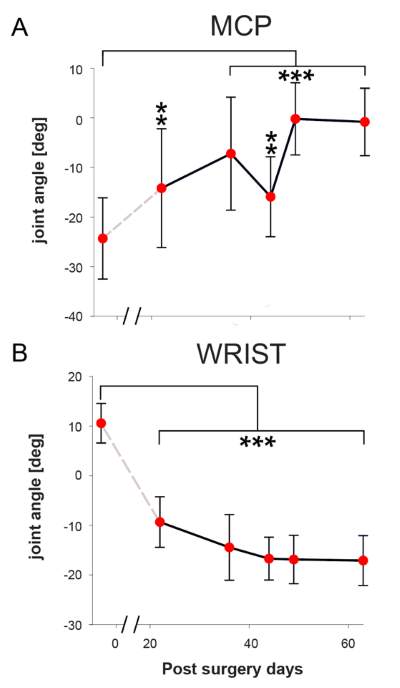
| 図2:運動学的解析により明らかにされた代償運動の学習曲線 タスク中のサルの手関節および中手指節関節(MCP関節)の角度変化。 (A) 手術後、MCP関節角度が大きく開き、より大きく指が伸びた。 (B) 同時に手関節角度は減少し、手関節屈曲が示された。 この協調的な動作パターンは、能動的テノデーシス効果(トリックモーション)の特徴であり、指伸展を達成するための代償戦略として用いられたことが示唆される。統計解析の結果、これらの変化は有意であることが確認された(p < 0.0001、α = 0.01、ANOVA) |
本研究の意義
本研究は、運動リハビリテーションの際、「早く成功すること」と「うまく・楽に成功すること」は別物であることを、腱移行モデルを用いた行動とEMGの連続観察から明確に示しました。早期の“すばやい適応”は誤適応的で高コストになりやすく、時間とともに進む“ゆっくりした適応”が協調と省エネを取り戻します。この知見は、最適なリハビリ戦略の設計に直結します。初期において、健康時と同様な運動の成功に対して無理に“すばやい適応”を目指すと、本研究のように誤適応を誘発し、患者さんに多くの負担をかけます。そうではなく、「変化した身体」に最も適した運動様式(本研究におけるトリックモーションのように)の獲得に時間をかけ、促進させることがより効果的であることを示唆しています。
今後の展望
今後は、サルで見いだした「早期は誤適応的・高努力、後期は協調回復・省エネ」という二段階の適応特徴が、ヒトの患者さんでも再現されるのかを検討します。そのために、NCNPの研究所・脳病態統合イメージングセンター(IBIC)・病院が連携し、腱移行手術後の患者さんを対象に、筋電図(EMG)、脳活動(fMRI)、動作解析などの縦断計測をすでに開始しています。EMGの共同収縮指標や活動総量、動作の滑らかさ、fMRIでの運動関連ネットワークの変化などを時系列に沿って追い、いつ・どの指標に“すばやい適応”と“ゆっくりした適応”が反映されているのかを突き止め、それらをリハビリテーションプログラムに反映させていきます。
将来的には、これらのデータを組み合わせ、患者さんの症状や回復段階に合わせた“カスタムメード”のリハビリプログラムをご提案できる体制をめざします。たとえば、早期の誤適応を抑制するためのメニュー、また後期の“実用的な最適解”にできる限り早く誘導するプログラム、またそれらの組み合わせなどによって、2段階の適応に沿ったリハビリプログラムの個別化を進めます。さらに、「異なる2段階の適応を常に考える」という視点は、腱移行に限らず、脳卒中後の運動回復、末梢神経損傷、整形外科手術後の回復、装着型機器やBMIの学習など、多くの疾患・治療場面に共通すると考えられます。この視点を取り入れることで、誤適応を早期に見抜き、適切な切り替えを促すための評価指標と介入デザインが、より効果的に構築できると期待しています。
用語解説
※1: 腱移行(けんいこう):
筋と骨をつなぐ腱の付け根を付け替え、筋の役割(伸ばす・曲げるなど)を入れ替える手術です。失った機能を別の筋で補う目的で臨床的に広く行われています。
※2: 筋電図(EMG):
筋がどれくらい働いているかを、筋から電気的に記録する方法です。脳の運動制御パターンや努力量の推定に用います。
※3: 誤適応(maladaptation):
短期的には成功をもたらすものの、大きな努力や非効率を伴う“うまくない適応”を指します。
※4: 共同収縮:
拮抗する筋(曲げる筋と伸ばす筋)が同時に強く働く現象です。力は出ますが、しばしば無駄なエネルギーになります。
原論文情報
論文名:Multi-timescale neural adaptation underlying long-term musculoskeletal reorganization
著 者:Roland Philipp, 原友紀、太田直人、内田直輝、大屋知徹、舩戸徹郎、関和彦
掲載誌:eLife
掲載誌:PLOS Digital Health
DOI:https://doi.org/10.7554/eLife.108684.1
助成金
本成果は、主に以下の研究助成を受けて行われました。
- 文部科学省科学研究費助成金:26120003, 26250013, 15K21754, 19H05724, 19H01092, 23H05488, 946 24K21313
- 日本医療研究開発機構:JP24gm0010009
- 国際共同研究プログラムに基づく日米連携による脳情報通信研究:22102
参考リンク
神経研究所
https://www.ncnp.go.jp/neuroscience/index.php
モデル動物開発研究部
https://www.ncnp.go.jp/nin/guide/r_model/



{kind=link}